
 个人中心
个人中心 退出
退出




树莓派/PC实现实时摄像头数据共享(Python—OpenCV)
使用Python和OpenCV实现树莓派/PC实时摄像头数据共享,主要分为服务器和客户端两部分。
服务器Demo如下:
- #服务器端
-
- import socket
- import threading
- import struct
- import time
- import cv2
- import numpy
-
- class Carame_Accept_Object:
- def __init__(self,S_addr_port=("",8880)):
- self.resolution=(640,480) #分辨率
- self.img_fps=15 #每秒传输多少帧数
- self.addr_port=S_addr_port
- self.Set_Socket(self.addr_port)
-
- #设置套接字
- def Set_Socket(self,S_addr_port):
- self.server=socket.socket(socket.AF_INET,socket.SOCK_STREAM)
- self.server.setsockopt(socket.SOL_SOCKET,socket.SO_REUSEADDR,1) #端口可复用
- self.server.bind(S_addr_port)
- self.server.listen(5)
- #print("the process work in the port:%d" % S_addr_port[1])
-
-
- def check_option(object,client):
- #按格式解码,确定帧数和分辨率
- info=struct.unpack('lhh',client.recv(8))
- if info[0]>888:
- object.img_fps=int(info[0])-888 #获取帧数
- object.resolution=list(object.resolution)
- # 获取分辨率
- object.resolution[0]=info[1]
- object.resolution[1]=info[2]
- object.resolution = tuple(object.resolution)
- return 1
- else:
- return 0
-
- def RT_Image(object,client,D_addr):
- if(check_option(object,client)==0):
- return
- camera=cv2.VideoCapture(0) #从摄像头中获取视频
- img_param=[int(cv2.IMWRITE_JPEG_QUALITY),object.img_fps] #设置传送图像格式、帧数
- while(1):
- time.sleep(0.1) #推迟线程运行0.1s
- _,object.img=camera.read() #读取视频每一帧
-
- object.img=cv2.resize(object.img,object.resolution)
- #按要求调整图像大小(resolution必须为元组)
- _,img_encode=cv2.imencode('.jpg',object.img,img_param) #按格式生成图片
- img_code=numpy.array(img_encode) #转换成矩阵
- object.img_data=img_code.tostring() #生成相应的字符串
- try:
- #按照相应的格式进行打包发送图片
- client.send(struct.pack("lhh",len(object.img_data),object.resolution[0],
- object.resolution[1])+object.img_data)
- except:
- camera.release() #释放资源
- return
-
- if __name__ == '__main__':
- camera=Carame_Accept_Object()
- while(1):
- client,D_addr=camera.server.accept()
- clientThread=threading.Thread(None,target=RT_Image,args=(camera,client,D_addr,))
- clientThread.start()
客户端Demo如下:
- #客户端
-
-
- import socket
- import cv2
- import threading
- import struct
- import numpy
-
- class Camera_Connect_Object:
- def __init__(self,D_addr_port=["",8880]):
- self.resolution=[640,480]
- self.addr_port=D_addr_port
- self.src=888+15 #双方确定传输帧数,(888)为校验值
- self.interval=0 #图片播放时间间隔
- self.img_fps=100 #每秒传输多少帧数
-
- def Set_socket(self):
- self.client=socket.socket(socket.AF_INET,socket.SOCK_STREAM)
- self.client.setsockopt(socket.SOL_SOCKET,socket.SO_REUSEADDR,1)
-
- def Socket_Connect(self):
- self.Set_socket()
- self.client.connect(self.addr_port)
- print("IP is %s:%d" % (self.addr_port[0],self.addr_port[1]))
-
- def RT_Image(self):
- #按照格式打包发送帧数和分辨率
- self.name=self.addr_port[0]+" Camera"
- self.client.send(struct.pack("lhh", self.src, self.resolution[0],
- self.resolution[1]))
- while(1):
- info=struct.unpack("lhh",self.client.recv(8))
- buf_size=info[0] #获取读的图片总长度
- if buf_size:
- try:
- self.buf=b"" #代表bytes类型
- temp_buf=self.buf
- while(buf_size): #读取每一张图片的长度
- temp_buf=self.client.recv(buf_size)
- buf_size-=len(temp_buf)
- self.buf+=temp_buf #获取图片
- data = numpy.fromstring(self.buf, dtype='uint8')
- #按uint8转换为图像矩阵
- self.image = cv2.imdecode(data, 1) #图像解码
- gray = cv2.cvtColor(self.image, cv2.COLOR_BGR2GRAY)
- cv2.imshow(self.name, self.image) #展示图片
- except:
- pass;
- finally:
- if(cv2.waitKey(10)==27): #每10ms刷新一次图片,按‘ESC’(27)退出
- self.client.close()
- cv2.destroyAllWindows()
- break
-
- def Get_Data(self,interval):
- showThread=threading.Thread(target=self.RT_Image)
- showThread.start()
-
- if __name__ == '__main__':
- camera=Camera_Connect_Object()
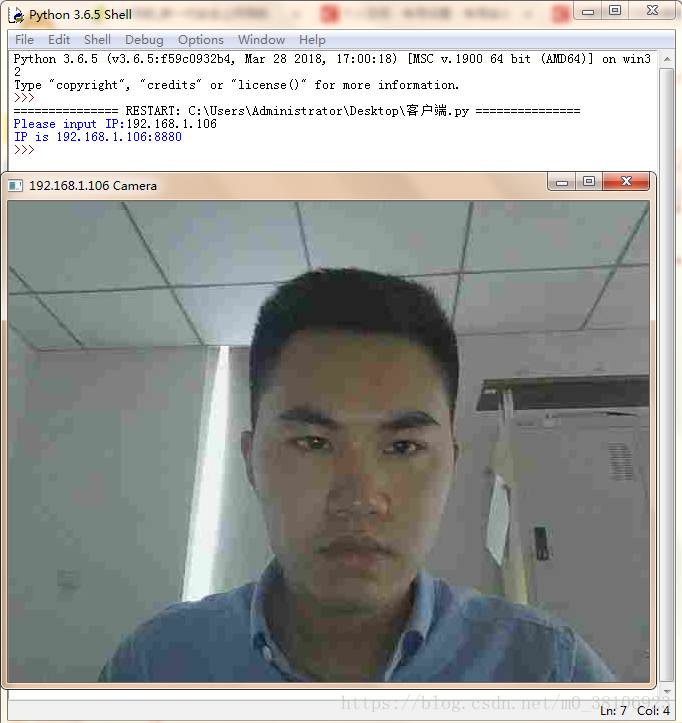
- camera.addr_port[0]=input("Please input IP:")
- camera.addr_port=tuple(camera.addr_port)
- camera.Socket_Connect()
- camera.Get_Data(camera.interval)
运行效果还是比较流畅的,因为传输网络视频流,所以画质欠佳。
树莓派视频传输改进方式见:https://blog.csdn.net/m0_38106923/article/details/82628061
树莓派视频传输最优方法:https://blog.csdn.net/m0_38106923/article/details/86562451
关注公众号,发送关键字:Java车牌识别,获取项目源码。
 分类导航
分类导航