
 个人中心
个人中心 退出
退出




一文搞懂图像二值化算法
传统的机器视觉通常包括两个步骤:预处理和物体检测。而沟通二者的桥梁则是图像分割(Image Segmentation)[1]。图像分割通过简化或改变图像的表示形式,使得图像更易于分析。
举个例子,食品加工厂新进了一批肉鸡,想通过视觉检测其美味程度。机器在预处理优化完图像之后,要先把图像中的鸡肉和背景分开,并对感兴趣的区域单独进行分析,才能做出快速准确的判断。

然而,图像分割对愚蠢的AI来说并不容易。聪明的人类一眼就能看出下图中哪些东西能吃、哪些不能吃。但计算机要把这些东西分开却得花费一番功夫。

最简单的图像分割方法是二值化(Binarization)。
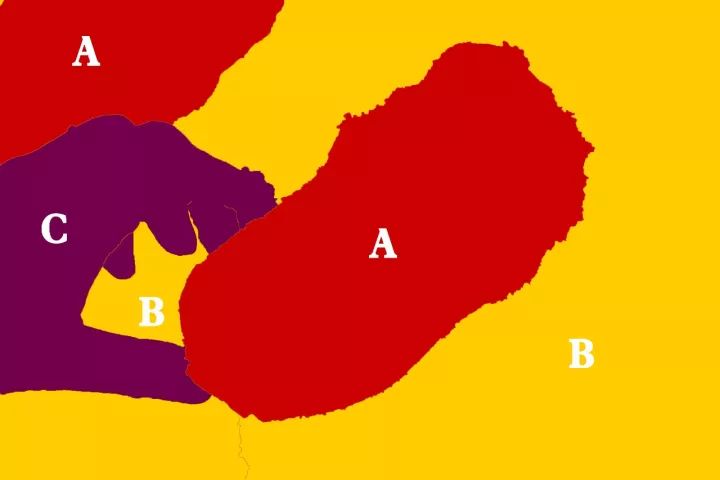
图像二值化( Image Binarization)就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程。二值图像每个像素只有两种取值:要么纯黑,要么纯白。

由于二值图像数据足够简单,许多视觉算法都依赖二值图像。通过二值图像,能更好地分析物体的形状和轮廓。二值图像也常常用作原始图像的掩模(又称遮罩、蒙版,Mask):它就像一张部分镂空的纸,把我们不感兴趣的区域遮掉。进行二值化有多种方式,其中最常用的就是采用阈值法(Thresholding)进行二值化。
在计算机视觉里,一般用矩阵来表示图像。也就是说,无论你的图片看上去多么好吃,对计算机来说都不过是个矩阵而已。
在这个矩阵里,每一个像素就是矩阵中的一个元素。在三通道的彩色图像中,这个元素是由三个数字组成的元组。

而对于单通道的灰度图像来说,这个元素就是一个数字。这个数字代表了图像在这个点的亮度,数字越大像素点也就越亮,在常见的八位单通道色彩空间中,0代表全黑,255代表全白。

阈值法是指选取一个数字,大于它就视为全白,小于它就视为全黑。就像教室里的灯管开关,我们轻轻地推动它,如果突然间超过了某个阈值,灯就啪的一声亮了。
根据阈值选取方式的不同,可以分为全局阈值和局部阈值。
1、全局阈值(Global Method)
全局阈值,指的是对整个图像中的每一个像素都选用相同的阈值。我们可以在Photoshop的图像—调整—阈值里体验这一操作:
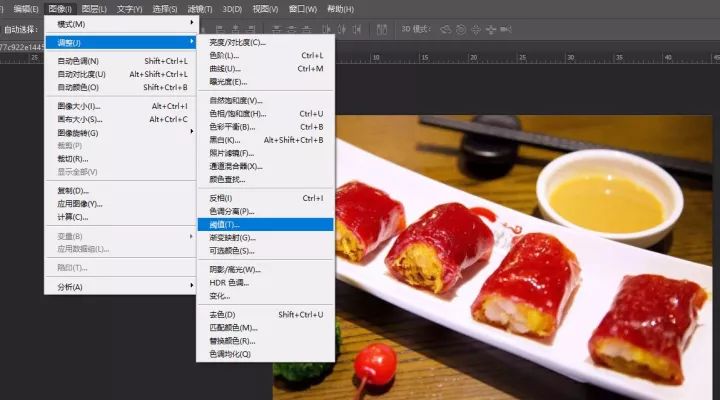
可以看到阈值色阶从1到255的移动过程中,图像变黑的区域越来越多。当阈值数字在某个特定范围内的时候,红米肠的轮廓清晰可辨。

在生产线环境下,光照是已知的,常常会设定一个固定的数字来作为全局阈值。但是在室外或者机器人比赛中,光照条件往往更加复杂。
同样是奥利奥冰激凌,在白天和晚上,摄像头看到的画面可能不太一样,常数阈值无法同时适应这两种情况。

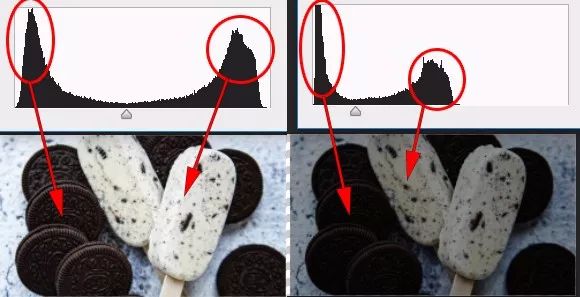
对于画面比较暗的晚上,我们需要一个比较低的阈值,比如说设定阈值为50,它在晚上能很清楚地把黑白两种颜色分开,但是到了白天就是一片白(左边);如果我们把阈值设置得比较高,比如说172,在白天能顺利分割,但在晚上就是一片黑(右边)。我们需要能够适应复杂环境的算法。

其实,稍作分析我们可以发现,这张图像中的颜色差异还是比较明显的,只有深浅两种颜色。因此,无论是在白天还是黑夜,它的色阶直方图都应该是两个明显的波峰,分别代表深色和浅色的区域。只是色阶直方图在白天会整体向右偏移,而在夜晚整体向左偏移。
如果选择两个波峰之间的波谷作为阈值,就能轻松地把这两类像素分开。但是图像的直方图往往是不连续的,有非常多尖峰和抖动,要找到准确的极值点十分困难。
日本工程师大津展之为这个波谷找到了一个合适的数学表达,并于1979年发表[2]。这个二值化方法称为大津算法(Otsu’s method)。大津算法类似于一维Fisher判别分析的离散化模拟。通过穷举法找到一个阈值数字,把这些像素切成两类,使得这两类像素的亮度的类内方差最小。类内方差指的是两类像素的方差的加权和,这里权指的是这类像素点数量占整个图像像素点数量的比值。
也许你的画面不会只有两坨差异较大的颜色,比如这款雪糕的就有三个尖峰。

这时候,只需对大津算法稍加扩展也可以完成。对大津算法的多级推广成为多大津算法(multi Otsu method)[3]。
2、局部阈值(Local Method)
局部阈值(Local Method)又称自适应阈值(Adaptive Thresholding)。
比赛中常常会有聚光灯照在一个特定区域,产生局部受光、局部不受光的画面。

对于局部受光的图像进行全局阈值,可能会出现“无论设置什么阈值参数,都无法满足全图要求”的尴尬。比如上面这幅图像,直接进行全局阈值时,左上半边的寿司全都显露出来时,右下半边还是一片黑色。
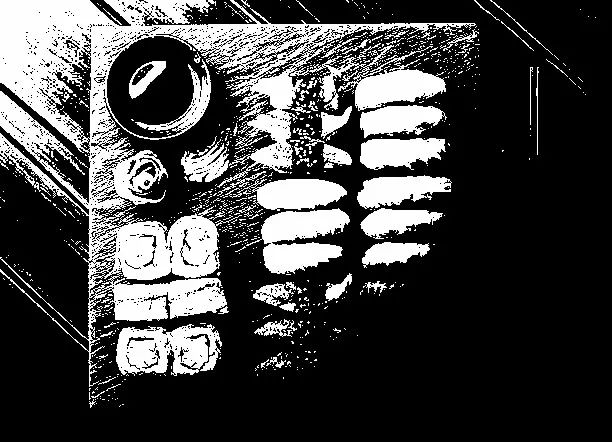
这个时候我们就要用到局部阈值来处理了。其实,人的眼睛也是自带了这一步操作的。我们判定一个东西颜色深浅,往往会受到物体周边的颜色影响,这也就是为什么黑人的牙齿看上去更白。
局部阈值法假定图像在一定区域内受到的光照比较接近。它用一个滑窗扫描图像,并取滑窗中心点亮度与滑窗内其他区域(称为邻域, neighborhood area)的亮度进行比较。如果中心点亮度高于邻域亮度,则将中心点标记为白色,否则标记为黑色。

这里提到的是局部阈值的基本方法,对于实际使用中常见的其他局部阈值方法,请参阅Chow-Kaneko自适应阈值法 [4]。
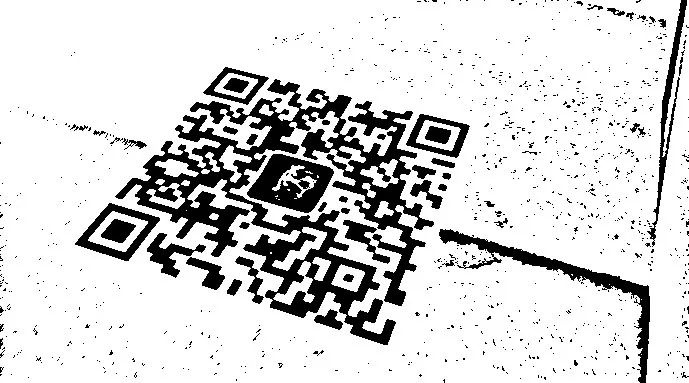
局部阈值的应用非常广泛,特别是对白纸黑字的处理非常有效。光学字符识别(OCR)和二维码扫描的算法中,很多都用了局部阈值操作。
比如下面这张二维码就是一张典型的局部受光图像:

如果对这张图片采用全局阈值(例如下图采用大津算法进行分割),是无论如何都无法正确分割的。

而采用局部阈值方法就能很好地分割图像。从图片里可以明显观察到,局部阈值方法对于一大片干净区域的细节比较敏感,所以纸面上多出了很多我们原本注意不到的斑点。
实际运用中,我们要根据需求选择不同的二值化方法,没有哪个方法是绝对完美的。
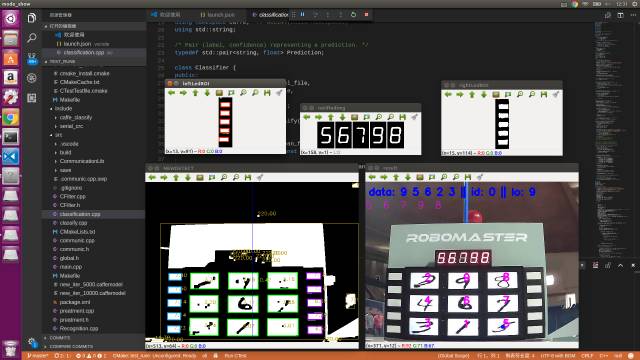
例如,在识别敌方机器人时,由于装甲片灯条是自发光物体,受环境光影响较小,为了提高程序运行效率,我们采用固定数字作为全局阈值:
在能量机关的识别中,由于能量机关只有黑白两种颜色,我们采用了大津算法及其多种变体:
而在空中机器人读取基地区二维码的时候又用到了局部阈值方法:
除了基于阈值的图像分割方法外,常用的分割方法还可以基于边缘(如Yanowitz-Bruckstein自适应阈值方法[5])、区域(如区域生长算法[6])等,它们在卫星图像处理、交通控制系统、工业生产监控、医疗影像等领域发挥着巨大的作用。

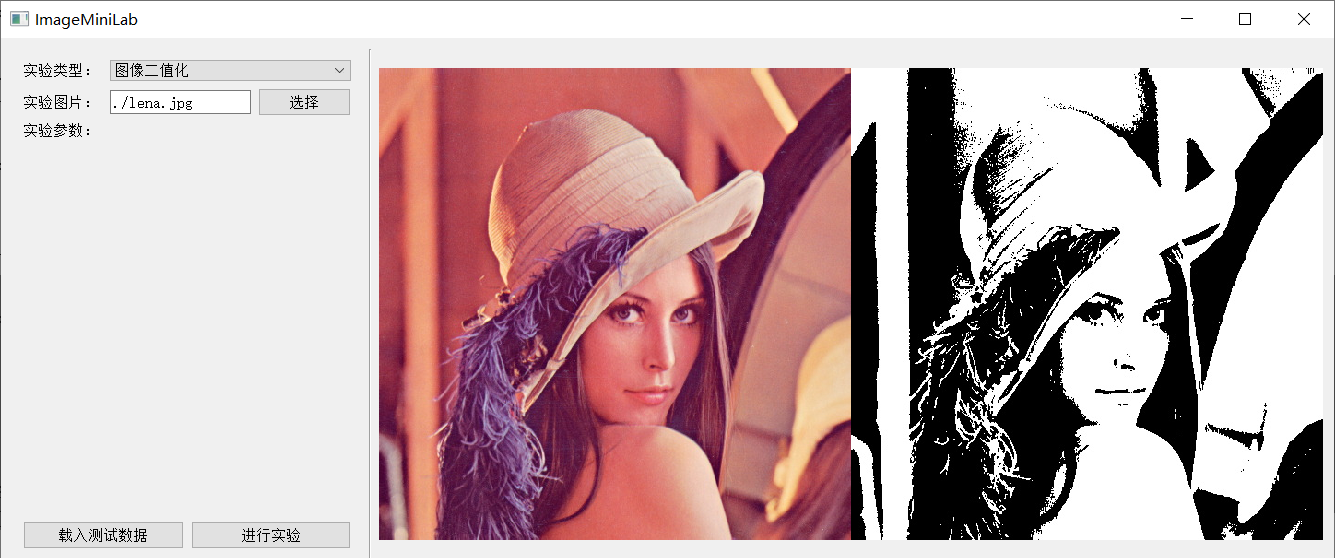
本文所述阈值方法的OpenCV实现,请参见博客:Python+OpenCV图像处理实验
参考文献
[1] Spirkovska, L. (1993). A summary of image segmentation techniques.
[2] Nobuyuki Otsu (1979). "A threshold selection method from gray-level histograms". IEEE Trans. Sys., Man., Cyber. 9 (1):62–66.
[3] Ping-Sung Liao and Tse-Sheng Chen and Pau-Choo Chung (2001). "A Fast Algorithm for Multilevel Thresholding". J. Inf. Sci. Eng. 17 (5):713–727.
[4] Chow,C.K.; and Kaneko, T.: Boundary Detection of Radiographic Images by a Thresholding Method. Frontiers of Pattern Recognition, S. Watanabe, ed.,Academic Press, New York, 1972, pp. 61-82.
[5] Yanowitz, S. D., & Bruckstein, A. M. (1988, November). A new method for image segmentation. In Pattern Recognition, 1988., 9th International Conference on (pp. 270-275). IEEE.
[6] Richardson H W. Regional growth theory[M]. Macmillan,1973.
关注公众号,发送关键字:Java车牌识别,获取项目源码。
 分类导航
分类导航